브러시리스 영구 자석 모터 작동은 전기에서 자석으로 에너지 변환에 의존한다. 자기 에너지는 토크의 생성에서 중심적인 역할을 하기 때문에 그것을 계산하는 방법을 공식화할 필요가 있다. 자기 에너지는 자기장의 공간 분포, 즉 자기장이 어떤 기구 내에서 어떻게 분포되는가에 크게 의존한다. 브러시리스 영구 자석 모터의 경우, 이는 모터 내의 자기장 분포를 찾는 것을 의미한다.
장치 내의 자기장 분포를 결정하는 방법은 다양하다. 매우 단순한 기하학에서 자기장 분포는 분석적으로 찾을 수 있다. 그러나 대부분의 경우 현장 분포는 근사치만 추정할 수 있다. 자기장 근사치는 일반적인 두 가지 형태로 나타난다. 우선, 자기장의 방향은 기기 내의 어느 곳에서나 알려진 것으로 가정한다. 이는 전기 회로 분석과 유사한 자기 회로 분석으로 이어진다. 다른 형태에서, 기구는 기하학적으로 분리되고, 자기장은 기구의 이산점에서 수치로 계산된다. 이 정보로부터 자기장의 크기와 방향은 기기 전체에 걸쳐 근사할 수 있다. 이 접근법은 일반적으로 유한요소해석이라고 하며, 유한차분법, 유한요소법, 경계요소법 등으로 알려진 다양한 유사한 수학적 방법을 구체화한다.
이 두 개의 자기장 근사치 중 유한요소해석은 기하학적 소실화가 충분히 미세할 경우 가장 정확한 결과를 산출한다. 컴퓨터의 힘은 이제 유한 요소 분석 솔루션을 합리적인 시간에 만들 수 있게 해주지만, 유한 요소 분석은 생산하는데 많은 시간이 걸릴 수 있는 기구의 상세한 모델을 요구한다. 유한 요소 분석은 관련된 시간 외에도 순수하게 수치적인 해결책을 만들어낸다. 해결책은 일반적으로 기구 내의 수천 개의 지점에서 발생할 수 있는 가능성으로 구성된다. 기하학적 매개변수와 그에 따른 자기장 분포의 변화는 분석적으로 관련되지 않는다. 따라서 많은 유한 요소 솔루션은 일반적으로 자기장 분포에 대한 다양한 매개변수의 영향에 대한 기본적인 통찰력을 개발해야 한다. 이러한 단점 때문에 유한 요소 분석은 설계 도구로서 광범위하게 사용되지 않는다. 오히려, 분석 설계 작업의 결과를 확인하거나 개선하기 위해 가장 자주 사용된다. 이 과제를 위해서는 유한 요소 분석이 불가결하다.
유한 요소 분석의 복잡성과 수치적 성격과는 반대로, 자기 회로 분석의 단순성 및 분석 특성은 많은 설계 작업에 가장 일반적으로 사용되는 자기장 근사 방법이 된다. 자기장의 방향이 장치 전체에 알려져 있다고 가정함으로써, 자기 회로 분석은 분석적으로 현장 분포를 근사하게 할 수 있게 한다. 이러한 분석적 관계 때문에, 문제의 기하학적 구조는 현장 분포와 명확하게 관련되므로, 상당한 설계 통찰력을 제공한다. 자기 회로 접근의 주요한 약점은 종종 그것을 결정하는 것이 어렵다는 것이다. 기구의 자기장 방향 더욱이 자기장 방향을 미리 결정하려면 자기회선해석을 이용한 사람의 경험에 의해 영향을 받는 주관적인 선견지명이 필요하다. 이러한 약점에도 불구하고, 자기 회로 분석은 브러시리스 영구 자석을 설계하는데 매우 유용하다. 이러한 이유로, 자기 회로 분석 개념은 이 장에서 개발되었다.
2.1 자기 회로 개념
기초 관계
두 벡터 수량, //(\footnotesize B//)와 //(\footnotesize H//)는 자기장을 설명한다. 자속 밀도(Flux Density //(\footnotesize B//)는 주어진 재료 영역을 통과하는 자기장의 밀도라고 생각할 수 있으며, 자계 강도(Field Intensity //(\footnotesize H//))는 부딪치는 재료와 //(\footnotesize B//)의 상호작용에 의한 자기장 강도의 결과적인 변화다. 모터 설계에 공통되는 자성 재료의 경우 //(\footnotesize B//)와 //(\footnotesize H//)는 동일직선상이다. 즉, 주어진 재료 내에서 동일한 좌표 방향으로 방향을 정한다. 그림 2-1은 재료의 차분 크기 블록에 대한 이러한 관계를 나타낸다. 이 그림에서 //(\footnotesize B//)는 z-방향의 블록을 통해 수직방향으로 향하며, //(\footnotesize H//)는 z-방향의 자계 강도의 변화다. 일반적으로 //(\footnotesize B//)와 //(\footnotesize H//)의 관계는 비선형적이고 다변량적이다. 그러나 많은 재료의 경우, 이 관계는 충분히 큰 작동 범위에 걸쳐 선형 또는 거의 선형이다. 이 경우, //(\footnotesize B//)와 //(\footnotesize H//)는 선형적으로 관련되어 있으며 다음과 같이 쓰여진다.
$$B=\mu H$$ (2.1)
여기서 //(\small \mu//)는 재료의 투자율(Permeability)이다.

자기 회로 분석은 재료 선형성과 //(\footnotesize B//)와 //(\footnotesize H//)의 결합도에 대한 가정에 기초한다. 두 가지 기본 방정식은 자기 회로 분석을 이끈다. 이 중 하나는 자속과 자속 밀도를 관련시키고, 다른 하나는 기자력(MagnetoMotive Force)과 자계 강도를 관련시킨다.
자기 회로 분석을 개발하려면 그림 2-1의 재료를 선형으로 하고, 자기 자속 밀도 //(\footnotesize B//)에 노출되는 단면적을 그림 2-2와 같이 비차분 크기로 자라게 한다. 각 미분 크기 블록을 통과하는 모든 자속 밀도를 누적하면 총 자속은 //(\footnotesize \phi//)로 표시된다. 이 합은 적분으로 표현될 수 있다.
$$\phi=\int B_z(x, y)dxdy$$ (2.2)

많은 상황에서, //(\footnotesize B_z(x, y)//)가 횡단면에 걸쳐 일정하거나 일정하다고 가정할 수 있다. 이 가정 하에서 위의 적분은 다음과 같이 간단하다.
$$\phi=BA$$ (2.3)
여기서 //(\footnotesize B//)는 일정한 자속 밀도이고 A는 블럭의 단면 면적이다. 국제 단위계(SI)에서 //(\footnotesize B//)는 제곱 미터당 웨버//((\footnotesize \mathrm{Wb/m^2})//) 또는 테슬라//((\footnotesize \mathrm{T})//)로 지정된다. 따라서 자속 //(\footnotesize \phi//)는 웨버//((\footnotesize \mathrm{Wb})//)로 명시된다. 이 방정식은 자기 회로 분석의 첫 번째 기본적인 방정식을 형성한다. 그림 2-2에서 블록 전체를 구성하는 각 차동 단면적의 자계 강도는 //(\footnotesize H//)이며, 모든 횡단면이 서로 평행하기 때문에 블록 전체의 필드 강도의 변화는 //(\footnotesize H//)와 동일하게 유지된다.
다음으로 그림 2-3과 같이 z-방향으로 블록을 늘리는 것을 고려한다. 블록이 z-방향으로 연장됨에 따라, 자속 //(\footnotesize \phi//)은 후속 두께 층을 통해 흐르면서 각 층에 대한 의 자기장 강도에 변화를 일으킨다. 따라서, 자계 강도의 총 변화는 각각의 미분량의 합이다.
$$ F=\int H dz=Hl $$ (2.4)

여기서 //(\footnotesize F//)는 기자력(MMF)으로 정의되며 //(\footnotesize l//)은 z-방향의 블록 길이다. //(\footnotesize H//)에 대한 SI단위는 미터당 암페어//((\footnotesize \mathrm{A/m})//)이므로 MMF는 암페어//((\footnotesize \mathrm{A})//) 단위를 갖는다. 방정식(2.4)은 자기 회로 분석의 제2차 기본 방정식을 정의한다.
이 두 가지 기본 방정식을 연결하는 것은 (2.1)에 주어진 재료 특성이다. (2.3)과 (2.4)를 (2.1)로 대체하고 재배열하면
$$ \phi=PF $$ (2.5)
여기서
$$P={\mu A \over l}$$ (2.6)
단면 //(\footnotesize A//), 길이 //(\footnotesize l//) 및 투자율 //(\footnotesize \mu//)를 갖는 재료의 투과도로 정의된다. 투자율은 암페어당 웨버//((\footnotesize \mathrm{Wb/A})//) 또는 헨리(//(\footnotesize \mathrm{H}//)) 단위로 설명된다. 투자율이 높은 재료는 투과도가 더 높기 때문에 이를 통한 자속 흐름이 더 커진다.
방정식 (2.5)는 옴의 법칙인 //(\footnotesize I=GV//)와 유사하다. 전류와 마찬가지로 폐로에서 자속이 흐른다. //(\footnotesize F//)는 전압이 기전력(EMF)인 것과 마찬가지로 기자력(MMF)이며, 직사각형 블록의 저항성 블록의 전도성은 전도성 대체성으로 투과도 방정식 (2.6)과 동일하다.
투과도의 역수는 자기저항이고, 다음과 같이 주어진다.
$$R={1 \over P}={l \over \mu A}$$ (2.7)
자기저항에 관한 항으로
$$ F=\phi R $$ (2.8)
릴럭턴스는 저항과 유사하고, 이것은 //(\footnotesize V=IR//)로 쓰여진 옴의 법칙과 유사하다. 이 시점에서 전기 회로와 자기 회로 사이의 유사성은 저항을 통한 전류가 에너지 손실을 구성하는 반면, 릴럭턴스를 통한 자속 흐름은 에너지 저장을 구성하기 때문에 종료된다.
자기장 근원
자기장의 두 가지 일반적인 근원이 있는데, 하나는 전선으로 흐르는 전류, 다른 하나는 영구자석이다. 영구자석은 뒤로 미루고, 그림 2-4와 같이 코어라고 하는 퍼미언스가 높은 재료의 조각을 감싼 와이어 코일을 고려한다. 코일을 흐르는 전류는 암페어의 법칙을 적용하면 찾을 수 있는 자기장을 생성한다. 이 법칙은 선적분으로 명시되어 있다.

$$ \oint_C \overrightarrow{H} \cdot \overrightarrow{dl}= \begin{cases} i, & \mathrm{if \enspace C \enspace encloses \enspace I} \\ 0, & \mathrm{otherwise} \end{cases} $$ (2.9)
여기서 //(\footnotesize C//)는 어떤 폐쇄 경로나 등고선이며 //(\footnotesize I//)는 등고선으로 둘러싸인 총 전류다. 이 표현식에서 //(\footnotesize \overrightarrow{H} \cdot \overrightarrow{dl} //)은 벡터 자계 강도와 등고선 //(\footnotesize C//)의 미분 벡터 //(\footnotesize dl//)사이의 벡터 내적이다. 총 전류 //(\footnotesize I//)에 관한 //(\footnotesize H//)의 방향은 우측 나사 규칙에 의해 관련된다. 포지티브 전류는 닫힌 경로를 통과하는 방향으로 회전하는 우측 나사의 전진 방향으로 흐르는 것으로 정의된다. 또는 와이어를 흐르는 전류에 의해 생성되는 자기장은 그림 2-5와 같이 오른손 법칙에 의해 방향이 정의된다.
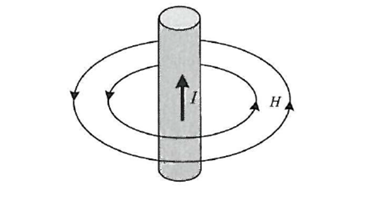
그림 2-4와 같이 //(\footnotesize i//)암페어의 전류를 전달하는 //(\footnotesize N//)턴 수로 둘러싸는 등고선에 위의 관계의 적용
$$ I=Ni=\displaystyle \int_a^b H_{ab} dz + \displaystyle \int_b^c H_{bc} dr + \displaystyle \int_c^d H_{cd} (-dz) + \displaystyle \int_d^a H_{da} (-dr) $$ (2.10)
여기서 //(\footnotesize H_{\alpha\beta}//)는 등고선의 //(\footnotesize \alpha\beta//)부분과 일치하는 자계 강도의 구성요소다. 코어에 무한 투자율이 있는 경우, 자기장이 코어에 국한되어 z-방향 성분만 있음을 알 수 있다. 주변 재료의 투자율보다 훨씬 더 큰 유한한 투자율의 경우, 기본적으로 자계는 코어에 국한된다. 따라서 첫 번째를 제외한 위의 방정식의 모든 항은 0이다. 위의 가정을 사용하면 다음과 같이 간단해진다.
$$ Ni = \displaystyle \int_a^b H_{ab}dz=Hl $$ (2.11)
여기서 //(\footnotesize N//)은 닫힌 턴 수, //(\footnotesize i//)는 전류, //(\footnotesize l=|b-a|//)이다. 자계 강도 //(\footnotesize H//)와 길이 //(\footnotesize l//)의 제품은 (2.4)에 따른 MMF이므로 (2.11)은 와이어 코일이 값 //(\footnotesize F=Ni//)의 MMF 소스로 모델링됨을 의미한다. 이 MMF 소스는 전기 회로의 전압 소스와 유사하다. 직관적으로, MMF 소스는 자기 회로를 통해 자속이라고 불리는 액체를 밀어내는 압력을 제공한다. MMF는 전류와 회전의 제품에 의해 주어지기 때문에 종종 암페어 턴 단위로 설명된다. 그러나 턴 수는 무차원이기 때문에 앞에서 설명한 대로 암페어 MMF 단위를 제공하는 SI 단위에서는 무시된다.
MMF 공급원의 값은 코일에 의해 취해진 실린더의 길이의 함수가 아니라는 점에 유의해야 한다. 실린더 자체는 앞에서 설명한 바와 같이 저항 또는 투과성으로 모델링 되어야 한다. 따라서, 그림 2-6에 나타난 바와 같이, 코어에 대한 실제 권선은 내성이 있는 직렬로 MMF 소스로 모델링 된다.

공극 모델링
모든 모터에서, 자속은 공극을 통해 회전자와 고정자 사이를 통과한다. 이 때문에 공극의 투과도나 자기저항을 모델링하는 것이 중요하다. 투과도가 높은 재료의 두 블록 사이에 공극이 발생하는 그림 2-7에 나타낸 구조를 고려한다. 그림 2-7의 이상적인 흐름선으로 묘사된 자속의 흐름은 공극을 통해 한 블록에서 다른 블록으로 전달되며 두 블록 사이에 MMF 강하를 생성한다. 이 공극 //(\footnotesize P_g //)의 투과도는 블록 가장자리 근처의 공극에 자속이 직선으로 흐르지 않기 때문에 모델화하기 어렵다. 이는 간격의 공기가 간격 근처의 공기와 동일한 투과도를 가지기 때문에 일부 자속이 그림 2-7과 같이 주변 공기로 밀려들기 때문이다. 공극의 퍼미언스는 공극의 정확한 자기장 분포에 따라 달라진다. 이것은 유한 요소 방법을 사용하여 정확하게 계산할 수 있지만, 자기 회로 개념을 이용한 많은 용도에 충분한 정확도로 공극 투과도를 근사화하는 것이 가능하다.

요구되는 정밀도에 따라 그림 2-8에서 묘사된 것처럼 공극에서 자속 유동을 모델링하는 많은 기술이 있습니다. 가장 단순한 모델인 그림 2-8a는 프린징 자속(fringing flux)를 완전히 무시한 것이다.

여기서 //(\footnotesize g//)는 공극 길이, //(\footnotesize \mu_o //)는 자유 공간의 투자율 //(\footnotesize (4 \cdot 10^{-7} \mathrm{H/m}) //)는 공극을 향한 블록의 단면적이다. 비율 //(\footnotesize g/A//)가 작을 때 정확한 모델 2-8b의 개선은 //( \footnotesize P_{gb}=\mu_0 A'/g //)를 허용하며, 여기서 길이 //(\footnotesize g//)는 //(\footnotesize A//)의 둘레에 더해져 더 큰 면적 //(\footnotesize A'//)를 부여한다. 또 다른 개선은 공극을 가로 지르는 직접 자속 경로의 투과도와 병행하여 분리된 투과도로 프린징 자속을 모델링한다. 이것을 행하는 한 방법이 그림 2-8c에 도시되어 있다. 여기서, 프린징 자속은 한 블록의 측면에서 원호를 따라 가면서 간극 영역을 가로 질러 직선으로 진행한 다음 다른 블록으로 원호를 따라 간다. 이것은 자속이 취하는 정확한 경로가 아닙니다. 자속은 치아 표면에 직각인 치아를 남기지만 균일한 폭의 스트립이나 튜브를 통해 공기 중에 흐르지 않습니다. 그것은 일부 지역에서 함께 짜내어 다른 사람들에게 퍼집니다. 이러한 차이점에도 불구하고, 이 원호형 직선 모델링을 사용하면 그림 2-8에 표시된 첫 번째 두 모델보다 더 현실적인 해석 식으로 자속 흐름을 근사화 할 수 있습니다.
이 근사법을 사용하여 공극 투과도를 계산하면 전기 전도도와 마찬가지로 퍼머넌트가 병렬로 추가된다는 사실을 이용합니다. 그림 2-9의 공극 투과도 //(\footnotesize P_{gc} //)는 //(\footnotesize P_s //)와 //(\footnotesize P_f //)로 표시된 네 개의 투과도 요소의 합과 거의 같습니다. 직선 투과도 //(\footnotesize P_s //)는 식(2.6)을 사용하여 계산되지만, 프린징 투과도 //(\footnotesize P_g //)는 더 많은 작업이 필요합니다. 그림 2-9에 표현된 바와 같이, 는 각각의 길이 의 미분 폭의 투과도의 합이다. 그건,
$$ P_f=\sum{{\mu_o dA} \over l}=\sum{{\mu_o Ldx} \over l} $$
여기서 //(\footnotesize dA=Ldx //)는 각 미분 퍼미언스의 단면적이고 //(\footnotesize L//)은 페이지로 들어가는 블록의 깊이입니다. 이 방정식은 미분 요소의 합을 포함하기 때문에, 이것의 해는 적분에 의해 주어진다.
$$ P_f=\int_0^X {\mu_o L \over g+\pi x}dx= {\mu_o L \over \pi} \ln \bigg(1+{\pi X \over g} \bigg) $$
(2.12)

이 방정식에서 유일하게 알려지지 않은 것은 //(\footnotesize X//)로, 주름진 투과도가 블록의 측면까지 확장되는 정도입니다. //(\footnotesize X//)가 다른 기하학적 구속 조건에 의해 고정되지 않는 경우에는 일반적으로 공극 길이의 배수가 되도록 선택됩니다. 선택되는 정확한 값은 공극으로부터 멀리 이동함에 따라 미분 투과도의 기여가 감소하기 때문에 그다지 중요하지 않습니다. 따라서, //(\footnotesize X//)가 약 //(\footnotesize 10g//)을 초과하여 증가함에 따라, 전체 공극 투과도의 변화는 거의 없다.
슬롯 모델링
종종 전기 기계는 전류 운반 권선을 유지하는 공극을 향하는 슬롯을 가지고 있습니다. 권선이 비자성체이기 때문에, 슬롯을 포함하는 공극을 가로 지르는 자속은 슬롯 영역의 낮은 상대 투자율, 즉 //(\footnotesize \mu=\mu_o //)를 회피하려고 시도할 것이다. 이는 전체 공극 영역의 투과도를 결정할 때 고려해야만 하는 또 다른 요소를 추가합니다.
이 점을 설명하기 위해 슬롯이 고 투과도 재료의 하부 블록에 배치된 그림 2-10을 고려하십시오. 하나의 슬롯과 하나의 치를 고려하면 공극 투과도를 근사화하는 몇 가지 방법이 있습니다. 가장 간단하고 가장 조잡한 방법은 슬롯의 나머지 부분과 동일한 투자율의 재료를 포함한다고 가정하여 슬롯을 무시하는 것입니다. 이 경우, 투자율은 //(\footnotesize P_g=\mu_o A/g //)이고, 여기서 //(\footnotesize A//)는 간극을 마주 보는 총 단면적이며, 폭 //(\footnotesize \tau_s //)와 깊이 //(\footnotesize L //)의 곱으로 주어진다. 분명히, 이것은 부족한 근사이다. 슬롯의 상대 투자율은 블록 재료보다 상대적으로 낮다. 또 다른 대략적인 근사법은 //(\footnotesize P_g=\mu_0(A-A_s)/g //)의 투과도를 주는 슬롯상의 간극을 가로 지르는 자속을 무시하는 것입니다. 여기서 //(\footnotesize A_s=\omega_sL //)은 공극에 면하는 슬롯의 단면적입니다. 이 방법들 중 어느 것도 매우 정확하지는 않지만, 그들은 각각 공극 투과도에 대한 상한 및 하한을 나타냅니다.

슬롯팅이 있을 때 공극 투과도를 측정하는 두 가지 더 정확한 방법이 있습니다. 첫 번째는 슬롯 위의 간극을 가로 지르는 자속이 간극을 가로 질러 고 투과도 재료에 도달하기 전에 더 먼 거리를 이동한다는 관찰에 근거합니다. 결과적으로, 투과도는 //(\footnotesize P_g = \mu_o A/g_e //)다음과 같이 쓸 수 있다. 여기서, //(\footnotesize g_e=K_c g //)로 주어진 유효 공극 길이이며, 여기서 //(\footnotesize K_c >1 //)은 공극 길이 보정 계수이다. //(\footnotesize K_c //)에 대한 하나의 근사는 약 1세기 전에 출판된 카터의 계수로 알려져 있습니다. 컨포멀 매핑 (conformal mapping)이라는 기술을 적용함으로써 카터는 분석 자기장 솔루션을 결정할 수 있었습니다. 이 결과에서 카터는 //(\footnotesize K_c //)에 대한 표로 표시된 값을 제공했다. 결과를 더 유용하게 만들기 위해, 다른 사람들은 더 많은 작업을 수행했으며, 이는 Carter의 계수에 대한 분석적인 표현을 이끌어 냈습니다. 그러한 표현은 두 가지입니다.
$$ K_{c1}= \Bigg[ 1- {1 \over { \large{{\tau_s \over \omega_s}} \Big( 5{g \over \omega_s}+1 \Big) }} \Bigg]^{-1} $$ (2.13)
그리고,
$$ K_{c2}= \bigg[ 1-{2 \omega_s \over \pi \tau_s} \bigg\{ \tan^{-1} \bigg( {\omega_s \over 2g} \bigg)-{g \over \omega_s} \ln \bigg[ 1+{1 \over 4} \bigg( {\omega^s \over g} \bigg)^2 \bigg] \bigg\} \bigg]^{-1} $$ (2.14)
공극 투과도를 결정하는 다른 방법은 앞에서 논의한 직선 모델링인 원호를 사용합니다. 이 방법은 그림 2-10b에 나와 있습니다. (2.12)에 의해 기술된 것과 유사한 접근법에 따라, 하나의 슬롯 피치 //(\footnotesize \tau_s //)에 걸친 공극의 투과도는 다음과 같이 쓸 수 있다.
$$ P_g=2P_a+P_b=\mu_o L \bigg[ {\omega_t \over g}+{4 \over \pi} \ln \bigg( 1+ {\pi \omega_s \over 4g} \bigg) \bigg]$$
여기서 //(\footnotesize L //)은 페이지로 들어가는 블록의 깊이입니다. 일부 대수 조작의 경우 이 해결책은 앞 단락에서 설명한 공극 길이 보정 계수의 형식으로 작성할 수도 있습니다. 이 경우, //(\footnotesize K_c //)는 다음과 같이 주어진다.
$$ K_{c3} = \bigg[ 1-{\omega_s \over \tau_s}+{4g \over \pi\tau_s} \ln \bigg( 1+{\pi\omega_s \over 4g} \bigg) \bigg]^{-1} $$ (2.15)
(2.13), (2.14) 및 (2.15)를 비교하면 모두 공극 길이 보정 계수가 비슷하다는 것을 알 수 있습니다. 그림 2-11에서 볼 수 있듯이 //(\footnotesize K_{c3} //)는 카터의 역사적인 계수 표현보다 큰 보정 계수를 요구한다. 모든 경우에 보정 계수는 슬롯 비율 //(\footnotesize \omega_s / \tau_s //)가 증가함에 따라 증가합니다. 또한, 상대적 간극 길이 //(\footnotesize g/\tau_s //)가 증가함에 따라 감소한다. 슬롯 영역에서 더 긴 자속 경로 길이의 영향이 줄어들기 때문에 더 작은 슬롯 개구 및 더 큰 공극 길이는 더 적은 보정을 필요로 하기 때문에 이 두 가지 사실 모두 직관적인 의미를 갖습니다.
위에서 고려되지는 않았지만 슬롯 구조에서 공극을 가로 지르는 영구 자석의 존재는 카터 계수의 계산을 변경합니다. 이 경우, (2.13), (2.14) 및 (2.15)의 공극 길이//(\footnotesize g //)는 //(\footnotesize g+l_m/\mu_R //)로 대체해야 하며, 여기서 //(\footnotesize l_m //)은 자석의 길이이고 //(\footnotesize \mu_R //)는 자석의 상대 반동 투자율이다. 이 매개 변수에 대해서는 이 장의 뒷부분에서 자세히 설명합니다.

그림 2-12에 도시된 슬롯팅(slotting)의 중요한 결과 중 하나는 슬롯의 존재는 하나의 슬롯에 걸친 전체 공극의 단면적 //(\footnotesize (1-\omega_s/\tau_s) //)보다 작은 단면적으로 공극 자속을 압박한다는 것이다 피치. 따라서 치의 기저에서 평균 자속 밀도 //(\footnotesize B=\phi / A //)는 //(\footnotesize (1-\omega_s / \tau_s)^{-1} //)의 인자만큼 더 큽니다. 이 현상의 불만은 절제될 수 없습니다. 예를 들어, 공극을 가로 지르는 평균 자속 밀도가 //(\footnotesize 1.0 \mathrm{T} //)이고 슬롯 분율 //(\footnotesize \alpha_s = \omega_s / \tau_s //)가 0.5인 경우 치의 베이스에서 평균 자속 밀도는 //(\footnotesize 2.0 \mathrm{T} //)입니다. 이 자속 밀도 레벨로 충분하기 때문에 대부분의 자성 재료가 포화 (즉, 유효 투자율을 극적으로 감소)하기 위해서는 모터에서 달성 가능한 공극 자속 밀도의 상한이 있습니다. 나중에 이것은 모터 성능에 결정적인 요소로 나타납니다.

예제
앞의 논의는 자기 회로 분석의 기본 개념을 구체화합니다. 이러한 개념을 적용하려면 단면적에 대한 자기장 방향, 자속 경로 길이 및 자속 균일성에 대한 가정을 해야 합니다. 자기 회로 분석을 설명하기 위해 그림 2-13에 표시된 권선 코어와 해당 자기 회로도를 고려하십시오.

코어의 투자율이 주위 공기의 투자율보다 훨씬 크다고 가정하면, 자기장은 공극을 제외하고 코어에 본질적으로 한정된다. 구조를 자기 회로와 비교하면 코일은 값//(\footnotesize Ni //) 의 MMF소스로 표시됩니다. 코어 재료의 자기저항(reluctance)은 //(\footnotesize R_c = l_c/\mu A //)에 의해 모델링되며, 여기서 //(\footnotesize l_c //)는 공극의 한쪽에서 다른쪽으로의 코어의 중간 길이이고, //(\footnotesize \mu //)는 코어 재료의 투자율이며, //(\footnotesize A //)는 코어의 단면적. 이 모델링은 굽힘 주위의 자속 경로 길이를 중간 길이로 근사합니다. 또한 자속 밀도가 단면에 걸쳐 균일하다고 가정합니다. 공극 //(\footnotesize R_g //)의 자기저항은 앞서 논의한 공극 투과도의 역수로 주어집니다.
이 자기 회로의 해법은 MMF가 전압에 해당하고, 자속이 전류에 해당하며, 자기저항이 저항에 해당하는 전기 회로에 대한 Kirchhoff의 법칙을 따릅니다. 그림 2.8에 나타낸 3개의 공극 모델을 각각 사용하여, 자속 밀도 //(\footnotesize B=\phi A //)(그림 2.8a, b, c에서 각각 //(\footnotesize 0.91 \mathrm{T}//), //(\footnotesize 1.08 \mathrm{T}//) 및 //(\footnotesize 1.09 \mathrm{T}//) 인 //( \footnotesize X = 10g //)는 (2.12)의 그림 2-8c에 사용된다. 각각의 경우에 대해 공극 //(\footnotesize F_g=\phi R_g //)를 가로 지르는 MMF를 풀고 //(\footnotesize Ni=400 //)의 MMF소스에 대한 백분율로 결과를 표현하면 세 경우 각각 90.5%, 88.7% 및 88.6%가 됩니다. 이 결과는 프린지 보정을 포함하는 두 개의 공극 모델이 거의 동일한 결과를 도출하며, 이러한 결과는 프린지가 무시되는 그림 2-8a의 경우와 크게 다르다는 것을 보여줍니다. 또한 3 가지 경우 모두 공극을 가로 지르는 자속을 밀어 내기 위해 사용 가능한 기자력의 약 90%가 필요하기 때문에 공극이 회로를 압도합니다.
공극이 자기 회로를 지배한다는 사실은 실제로 중요한 의미를 갖습니다. 분석 작업의 경우 많은 경우 코어의 저항을 무시하여 분석을 상당히 단순화할 수 있습니다. 공극이 우세하다는 것은 또한 코어의 정확한 자기 특성이 코어의 투자율이 높은 상태라면 솔루션에 큰 영향을 주지 않는다는 것을 의미합니다. 이는 코어가 일반적으로 비선형 자기 특성을 갖는 재료로 만들어지기 때문에 운이 좋다.
계속 진행하기 전에 그림 2-13에 표시된 자기 회로는 코어를 둘러싸고 있는 공기가 공극에서 벗어나는 것을 무시합니다. 전기 회로에서, 도체 (예를 들어, 와이어)와 절연체 (예를 들어, 공기) 사이의 전도도 차이는 약 10이다. 결과적으로 전류는 전기 회로의 도체에 국한됩니다. 반면에, 자기 회로에서, 도체 (예를 들어, 코어)와 절연체 (예를 들어, 공기) 사이의 투과성의 차이는 통상 //( 10^2 ~ 10^3 //)의 차수에 불과하다. 따라서 일부 자속은 코어 재료에서 나와 주변 공기로 빠져나간다. 이 누설 자속을 포함하려면 관련된 자속 경로를 확인하고 그에 대한 자기저항 또는 투과도 모델을 결정한 다음 결과로 나오는 자기 회로를 해결해야합니다. 분명히 이것은 자기 회로 분석을 대단히 복잡하게 만듭니다. 이러한 이유 때문에, 그림 2-8b 및 2-8c에 도시된 바와 같이 1차 공극을 둘러싸는 것과 같이 지배적인 프린징 자속만 고려된다.
자기 회로 분석은 정확한 자기장 솔루션으로 이어지지 않습니다. 그러나 종종 설계 방정식의 공식화에 도움이 되는 분석 솔루션으로 이어집니다. 유한 요소 해석은 모든 자속 프린징 경로를 모델링하기 때문에 보다 정확한 자장 솔루션을 제공하지만 수치 솔루션만 제공합니다. 어떤 면에서는 자기 회로 분석이 거시 관측기의 문제를 해결하는 반면 유한 요소 분석은 미세 관측기의 문제를 해결합니다. 이 두 가지 접근법은 서로를 보완합니다. 한 접근법의 강점은 다른 접근법의 약점입니다. 두 가지 모두 브러시리스 영구 자석 모터의 설계에 가치가 있습니다.
'Book > BLDC Motor' 카테고리의 다른 글
| 브러시리스 영구자석 모터 설계(Ch. 3 전기적 및 기계적 관계: 3.1~3.2) (0) | 2019.10.15 |
|---|---|
| 브러시리스 영구자석 모터 설계(Ch. 2 자기 모델링: 2.2~2.4) (0) | 2019.10.07 |
| 브러시리스 영구자석 모터 설계(Ch. 1 기본 개념: 1.5-1.10) (0) | 2019.09.22 |
| 브러시리스 영구자석 모터 설계(Ch. 1 기본 개념: 1.1-1.4) (0) | 2019.09.22 |
| 원서 (0) | 2019.09.21 |




댓글