1.5 자석 극 및 모터 위상
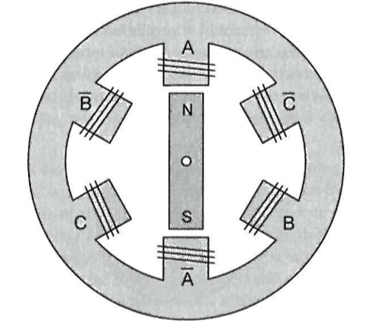
그림 1-10에 표현된 모터는 2개의 회전자 자석 극 및 3개의 고정자 단계를 가지지만, 임의의 수의 회전자 자석 극 및 1 이상의 크립 횟수를 갖는 브러시리스 영구 자석모터를 제조하는 것이 가능하다. 2상 및 3상 모터가 가장 일반적이며, 3상 모터는 다른 모든 모터를 지배합니다. 이러한 선택의 이유는 2상 및 3상 모터가 권선 전류를 제어하는 데 필요한 전력 전자 장치의 수를 최소화하기 때문입니다.
자석 극의 선택은 더 많은 유연성을 제공합니다. 브러시리스 영구 자석 모터는 2 ~ 50 개 또는 그 이상의 극으로 구성되며, 가장 일반적인 것은 한 자리 값입니다. 나중에 볼 수 있듯이, 더 많은 수의 자극이 보통 동일한 전류 레벨에 대해 더 큰 토크를 생성합니다. 반면에, 더 많은 자석 막대는 각 막대에 대한 공간이 적다는 것을 의미합니다. 결국, 회전자 자석 극 사이의 간격이 회전자의 총 공간의 상당 부분을 차지하고 토크가 더 이상 증가하지 않는 지점에 도달합니다. 자석 기둥의 최적 수는 모터 기하학과 재료 특성의 복잡한 함수입니다.
1.6 극, 슬롯, 치 및 요크
그림 1-10의 모터에는 집중 또는 솔레노이드 권선이 있습니다. 즉, 각 상 권선은 서로 분리되어 있으며 단순한 솔레노이드가 감긴 방식과 동일한 방식으로 돌출 극이라고 불리는 개별 극에 집중됩니다. 이 구조에 대한 보편적인 대안은 그림 1-11과 같이 각 위상의 권선이 겹치는 곳에 분포된 권선을 사용하는 것입니다. 고정자는 이제 고정자 요크(stator yoke) 또는 백 아이언(back iron)이라 불리는 강철의 외부 링으로부터 회전자상의 자석을 향하여 돌출된 치(teeth)를 갖는다. 치 사이에는 권선이 차지하는 슬롯이 있습니다. 각 권선은 하나의 슬롯에서 여러 개의 치(이 경우 3 개)를 가로 질러 다음 슬롯으로 이동합니다. 권선으로 둘러싸인 치는 그 코일의 극을 형성합니다. 상 권선이 개별적으로 여자 될 때, 회전자는 고정자 상에 생성된 관련 자극과 정렬되도록 회전한다. 그림 1-11a, b, c는 위상 A, B 및 C 각각에 대해 절연된 권선을 갖는 모터를 나타내고, 그림은 또한 각각의 위상 권선이 여자 될 때 치에 형성된 자극을 나타낸다. 다시, 상 권선의 순차적인 여자는 회전자를 회전시킵니다. 시각적으로 간단히 하기 위해, 그림 1-11d는 완전히 감긴 모터를 보여줍니다. 모든 코일이 제 위치에 놓이면, 감긴 모터는 각 슬롯에 두 개의 코일 측면을 갖습니다. 많은 모터의 경우, 이 모터의 각 슬롯에는 동일한 위상의 두 개의 코일 측면이 있으며, 코일 측면이 다른 슬롯이 없는 슬롯이 있습니다.

그림 1-11에 표현된 회전자는 회전자 요크 또는 백아이언이라 불리는 강철의 내부 링에 부착된 원호형 자석 조각으로 형성된다. 자석은 회전자 주변을 따라 진행하면서 번갈아 가며 자화된다. 이 경우, 회전자는 그림 1-10에 표시된 두 개의 극에 대항하여 네 개의 극을 가지고 있습니다.
그림 1-11에 표시된 모터 단면은 앞서 설명한 것보다 실제 모터를 더 잘 나타내지만 실제 모터보다 훨씬 간단합니다. 다음 장에서는 보다 실제적인 모터 구성에 대한 다양한 세부 정보를 제공합니다.
1.7 기계적 및 전기적 측정
전기 모터에서 위치와 속도의 두 가지 관련 측정을 정의하는 것이 일반적이다. 기계적 위치와 속도는 회전축의 각 위치와 속도다. 회전축이 완전히 한 바퀴 회전하면 //(\small 360^o//) 기계각(//(\small ^o \mathrm{M}//)) 또는 //(\small 2 \pi//) 기계 라디안(//(\small \mathrm{radM}//))을 통과한다. 이 회전을 하는 회전자는 출발점으로 바로 되돌아온다.
전기적 위치는 로터의 //(\small 360^o//) 전기각(//(\small ^o \mathrm{E}//)) 또는 //(\small 2\pi//) 전기 라디안 (//(\small \mathrm{radE}//))에 의한 회전자의 이동이 회전자를 동일한 자기 방향으로 되돌리도록 정의됩니다. 그림 1-10에서 회전자는 동일한 자기 방향에 도달하기 위해 //(\small 360^o \mathrm{M}//) 회전해야 하기 때문에 기계적 및 전기적 위치는 동일합니다. 다른 한편, 그림 1-11에서 로터는 동일한 자기 방향을 갖기 위해 //(\small 180^o \mathrm{M}//)만 움직일 필요가 있습니다. 따라서 //(\small 360^o \mathrm{E}//)는 이 경우 //(\small 180^o \mathrm{M}//)과 동일합니다. 이 두 가지 경우를 토대로, 전기적 위치와 기계적 위치 사이의 관계가 회전자의 자석 극수와 관련이 있음을 쉽게 알 수 있습니다. //(\small N_m//)이 공극을 향한 회전자상의 자석 극의 수인 경우, 즉 그림 1-10에 대해서는 //(\small N_m=2//)이고, 그림 1-11에 대해서는 //(\small N_m=4//)인 경우, 이 관계는
$$ \theta_e={N_m \over 2}\theta_m $$ (1.2)
여기서 //(\small \theta_e//)와 //(\small \theta_m//)은 각각 전기적 및 기계적 위치입니다. 자석에는 항상 2개의 극점이 있기 때문에 한 쌍의 극을 하나의 //(\small \mathrm{N}//)극과 하나의 //(\small \mathrm{S}//)극을 공극 방향으로 향하게 정의하는 것이 일반적입니다. 이 경우, 극 쌍의 수는 //(\small N_p= N_m/2//)와 같고 위의 관계는 간단합니다
$$ \theta_e=N_p\theta_m $$ (1.3)
시간에 대한 미분 (1.3)은 전기적 및 기계적 주파수 또는 속도 사이의 관계를
$$ \omega_e=N_p\omega_m $$ (1.4)
여기서 //(\small \omega_e//) 및 //(\small \omega_m//)은 각각 초당 라디안 단위의 전기적 및 기계적 속도입니다. 또한, 이 관계는 Hertz(초당 사이클)로 표현될 수 있습니다.
$$ f_e= N_p f_m $$ (1.5)
여기서 //(\small f_m=\omega_m/2\pi//), 나중에 //(\small f_e//)의 고조파가 논의될 때 //(\small f_e//)는 기본 전기 주파수라 불릴 것이다. 일반적으로 모터 기계 속도 //(\small S//)를 분당 회전수(//(\small \mathrm{rpm}//))로 지정하는 것이 일반적입니다. 참고로, //(\small S, \, \, f_m//)와 //(\small f_e//) 사이의 관계는
$$ \omega_m={\pi \over 30}S \approx {S \over 10} $$ (1.6)
$$ f_e={N_m \over 120} S={N_p \over 60} S $$ (1.7)
이 마지막 방정식은 모터가 //(\small \mathrm{rpm}//)으로 주어진 속도로 회전하기 위해 정류가 발생해야 하는 속도 또는 빈도를 설명하기 때문에 유용합니다. 이 주파수의 역수는 정류 시간주기, 즉 위상의 에너자이징이 한 사이클의 동작을 완료하는 시간의 길이를 제공한다.
기본적인 전기 주파수는 모터 구동에 사용되는 전력 전자 장치의 설계에 영향을 미칩니다. //(\small f_e//)가 증가함에 따라, 파워 전자 장치는 모터 샤프트의 회전을 유지하기 위해 더 빠르게 작동해야 합니다. 이것은 //(\small f_e//) 증가에 따라 전력 전자 제품이 더 비싸게 된다는 것을 의미한다. 이 때문에 고속으로 작동하도록 설계된 모터의 경우, 보다 적은 극을 사용하는 것이 일반적입니다. 즉 //(\small N_m//)을 줄입니다. 그러나 //(\small N_m//)을 줄이는 것은 페널티가 발생합니다. 극수가 감소하면 토크 생산 효율이 떨어집니다. 따라서 자석 극수를 선택할 때 전력 전자 비용과 토크 생산 효율 간에 절충안을 찾아야합니다.
이 텍스트에는 //(\small \theta//)와 //(\small \omega//) 같은 변수가 위치와 속도를 나타내기 위해 여러 가지 첨자가 있거나 없이 사용됩니다. 어떤 경우에는 이러한 변수가 전기량의 양을 나타냅니다. 다른 곳에서는 양을 기계적으로 측정합니다. 모든 경우에, 아래 첨자 //(\small e//)는 전기적 척도를 나타낸다. 아래 첨자 //(\small m//)은 기계적 척도를 나타낸다. 이 첨자가 사용되지 않을 때, 그들이 나타나는 문맥은 그들의 단위 척도를 분명히 한다.
1.8 모터 사이즈
모터 설계의 근본적인 질문은 다음과 같습니다. 모터가 필요한 토크를 생산하려면 얼마나 커야합니까? 반경 방향 자속 모터의 경우 이 질문에 대한 대답은
$$ T=kD^2 L $$ (1.8)
여기서 //(\small T//)는 토크, //(\small k//)는 상수, //(\small D//)는 로터 지름, //(\small L//)은 축방향 로터 길이 입니다. 이 관계를 이해하려면 그림 1-10에 표시된 모터를 다시 고려하십시오.
먼저 모터의 축 길이(페이지에 깊이)가 //(\small L//)과 같다고 가정한다. 이 길이에 대해 특정 토크 //(\small T_L//)이 가능하다. 이 모터가 중복되어 원래 모터의 끝에 추가되고 회전축이 서로 연결된 경우 사용 가능한 총 토크는 각 모터, 즉 //(\small T=T_L+T_L//)의 합이 된다. 즉, 축방향 회전체 길이를//(\small 2L//) 까지 유효하게 2배로 증가시키면 가용 토크가 2배로 증가한다. 따라서 토크는 (1.8)과 같이 //(\small L//)에 선형적으로 비례한다.
//(\small D^2//)관계를 이해하려면 조금 더 노력해야합니다. 그림 1-4에 도시된 렌치 및 너트의 설명에서, 소정의 힘은 반경, 즉 //(\small D/2//)에 비례하는 토크를 생성한다고 언급되었다. 따라서 토크는 직경에 적어도 선형적으로 비례합니다. 그러나, 힘을 발생시키는 능력은 또한 직경에 선형적으로 비례함을 주장할 수 있다. 이는 회전자 둘레가 직경에 따라 선형적으로 증가하기 때문에, 예를 들어, 원의 원주가 //(\small \pi D//)와 동일하기 때문에 발생한다. 이 관계를 보는 간단한 방법은 그림 1-10의 단순 모터와 그림 1-11의 단순 모터를 비교하는 것입니다. 그림 1-10의 모터가 토크 //(\small T//)를 생성하면 그림 1-11의 모터는 2배의 힘을 발생시키기 때문에 //(\small 2T//)와 동일한 토크를 생성해야 합니다. 분명한 것은 지름이 커지면 회전자 주위에 자석이 점점 더 많이 생깁니다. 따라서 힘을 발생시키는 능력이 직경에 따라 선형적으로 증가한다는 것은 의미가 있습니다. 이 두 가지 요인을 결합하면 토크가 직경 제곱에 비례한다는 바람직한 관계(1.8)가 생깁니다.
1.9 단위
달리 명시되지 않는 한이 텍스트는 국제 단위 시스템 (SI 단위)을 사용합니다. 이렇게 하면 표현과 파생을 복잡하게 만드는 변환 요소가 필요하지 않습니다. 반면에 SI 단위는 실제로 보편적으로 사용되지 않습니다. 몇 가지 다른 단위 시스템이 일반적으로 사용됩니다. 각각 고유의 장점과 단점이 있습니다. 독자는 이 텍스트의 표현과 수량을 선택한 단위 시스템으로 변환할 수 있다고 가정합니다.
1.10 요약
이 장에서는 브러시리스 영구 자석 모터 설계와 관련된 기본 개념을 개발했습니다. 방사상 자속 및 축방향 자속 형상이 설명되었다. 토크와 힘의 관계가 개발되었고 자석의 기본 특성을 사용하여 모터 작동 방식을 직관적으로 설명했습니다. 그 과정에서 코일, 권선, 상, 극, 슬롯, 치 및 요크의 아이디어가 소개되었습니다. 일반적으로 유지되는 //(\small D^2L//)사이징 관계도 직관적으로 정당화되었습니다. 나머지 장의 목적은 이 장에서 얻은 직관을 사용하고 확장하는 것입니다.
'Book > BLDC Motor' 카테고리의 다른 글
| 브러시리스 영구자석 모터 설계(Ch. 3 전기적 및 기계적 관계: 3.1~3.2) (0) | 2019.10.15 |
|---|---|
| 브러시리스 영구자석 모터 설계(Ch. 2 자기 모델링: 2.2~2.4) (0) | 2019.10.07 |
| 브러시리스 영구자석 모터 설계(Ch. 2 자기 모델링: 2.1) (0) | 2019.09.22 |
| 브러시리스 영구자석 모터 설계(Ch. 1 기본 개념: 1.1-1.4) (0) | 2019.09.22 |
| 원서 (0) | 2019.09.21 |




댓글